This project aims to provide an introduction to the modeling of tendon-driven continuum robots to the community, and provides open-source code as well in order to get started
MATLABC++
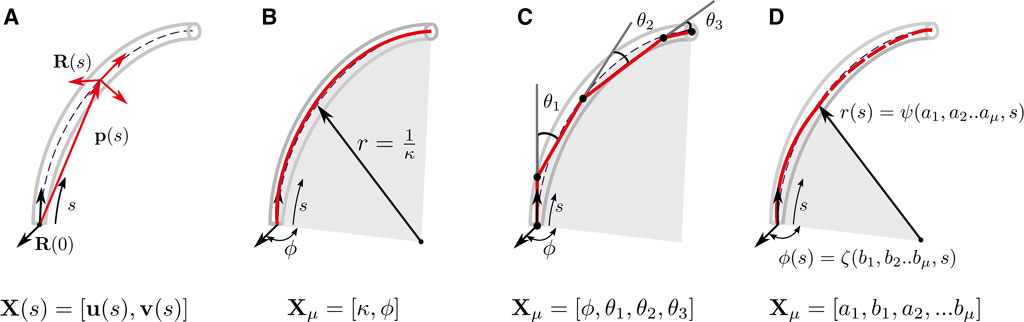
We propose the use of EulerArcSplines to represent TDCRs
ModelingTDCR
A look into locking mechanisms and their modeling
Modeling
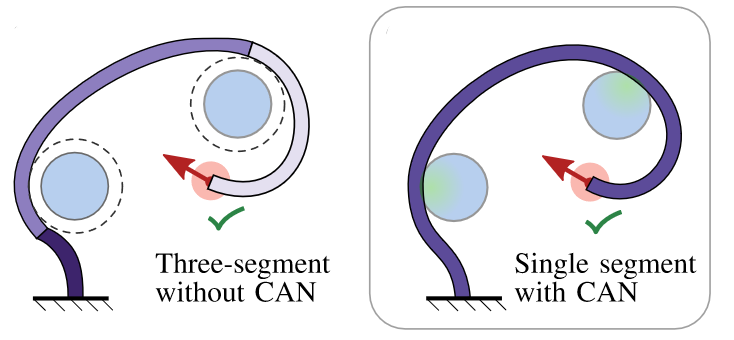
Introducing a contact-implicit motion planner for contact-aided navigation of TDCRs
OpenCR BlogCANMotion Planning
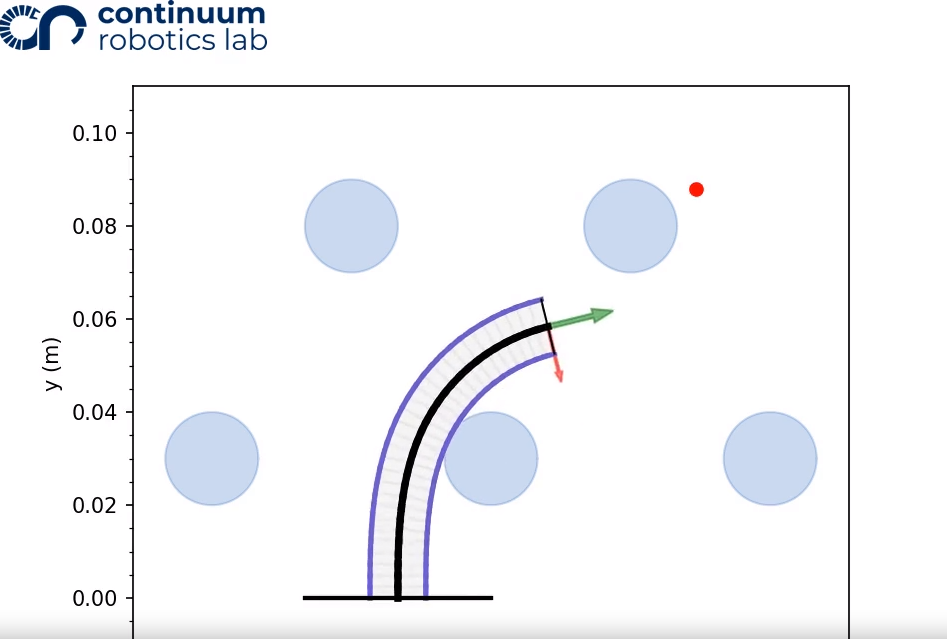
An open-source model to simulate contact interactions of TDCRs